В приложениях для iOS довольно логично использовать рекламу от Apple - iAD. Нюансы начинаются, если хочется провести акцию "неделя без рекламы", или вообще отключить ее навсегда, чтобы не досаждала пользователям, или вообще реклама работает в паре с AdMob и показы iAD уменьшают доходы AdMob, а ничего существенного не приносят.
В моем случае была вот такая картина:
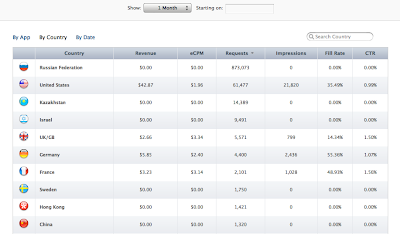
Вкратце эта табличка означает, что целевой аудитории (Россия) вообще ни разу не показывалась реклама, а за месяц показа в США и Европе она принесла чуть меньше $50. С таким фил рейтом и eCPM порядка $2 лучше отказаться от iAD совсем. Apple для отключения рекламы говорит следующее:
iTunes Connect Developer Guide page 129:
Once your app has been submitted, iAd cannot be disabled. To remove ads from an app, you will need to submit a new binary with ad functionality removed
Дословно это означает, что надо залить версию без рекламы. Подход отличный, только аппрув новой версии может затянуться на недели.
К счастью, лазейка нашлась в управлении настройками iAD через сайт iTunesConnect: там их минимальное количество, но зато можно указывать фразы, которые будут искаться в ссылках/текстах рекламы и по ним реклама будет фильтроваться:

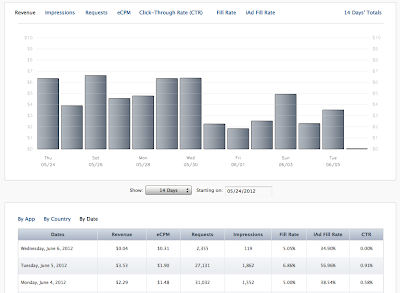
Собственно, весь трюк видно на этом скриншоте. Фильтры по ключевым словам www, http, com, itunes должны отфильтровать 90-95% рекламных объявлений и ссылок. Покрытие фильтра не 100%, некоторые баннеры могут пробиться, но результат становится заметен буквально уже на следующий день:
Может метод и не совсем корректный, но в любом случае это хороший временный вариант, пока обновленная версия проходит одобрение.










